【关键词】摘钩机器人;深度学习;多传感器融合
引言
随着电力工业的发展,电厂摘钩作业的智能化需求日益增加,传统人工操作方式存在效率低、误差大等问题[1]。为满足电厂复杂环境中的高精度定位要求,开发具备自动识别与定位能力的摘钩机器人系统显得尤为重要。本研究通过结合深度学习算法和多传感器技术,实现了摘钩机器人在电厂作业中的自动化与精准定位,为电力行业智能化发展提供了重要的技术支持。
一、电厂摘钩机器人自动定位系统整体设计
(一)系统架构设计
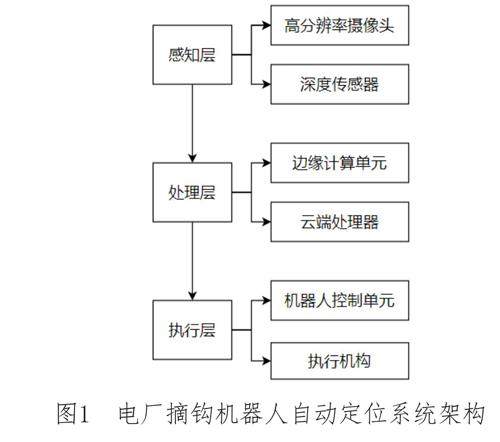
本系统采用分层架构,包括感知层、处理层和执行层。系统的整体架构如图1所示。感知层由高分辨率摄像头和深度传感器组成,用于捕获环境信息;处理层包含边缘计算单元和云端服务器,通过深度学习算法进行目标检测和定位;执行层由机器人控制单元和执行机构组成,能够精确定位和抓取[2]。系统通过高速工业以太网实现各层间的实时数据传输,确保低延迟响应;采用冗余设计和故障检测机制,以提高系统可靠性。
(二)硬件与软件平台设计
本系统采用高性能硬件和先进软件平台,以满足电厂环境下实时目标检测和精确定位的需求。硬件核心采用NVIDIA Jetson AGX Xavier计算模块,配备高分辨率摄像头和深度传感器,结合多自由度机械臂,实现精准操作。软件平台基于Ubuntu系统和ROS2框架,集成深度学习算法和微服务架构,实现高效的任务处理和系统监控。
(三)人工智能算法选择
本系统选用改进的YOLOv5s作为目标检测算法,通过增加注意力机制和特征金字塔网络(Feature Pyramid Network,FPN)提高检测精度。定位算法采用基于PointNet++的3D点云分割网络,结合迭代最近点(Iterative Closest Point,ICP)算法实现亚毫米级精度;为适应电厂复杂环境,引入基于ResNet50的场景分类网络,动态调整检测和定位参数。系统还集成了基于长短期记忆网络(Long Short-Term Memory,LSTM)的时序预测模型,用于预估目标物体的运动轨迹,提高抓取成功率。所有模型均经过知识蒸馏和量化,以适应边缘计算环境。
二、基于深度学习的目标检测与定位算法应用
(一)YOLO算法原理与改进
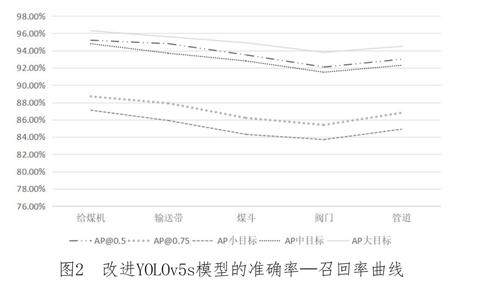
YOLO算法将目标检测问题转化为回归问题,通过一次前向传播同时预测多个边界框和类别概率[3]。本系统基于YOLOv5s进行改进,引入注意力机制和FPN。具体改进措施包括:在骨干网络中加入即插即用的卷积块注意力模块(Convolutional Block Attention Module,CBAM),增强关键特征提取;采用改进的PANet结构替代原FPN,实现更有效的多尺度特征融合;引入Focal Loss,缓解类别不平衡问题;使用DIoU Loss优化边界框回归。这些改进显著提高了模型在小目标和密集场景下的检测性能。
(二)目标检测网络训练
1.数据集构建与预处理
数据集由30,000张电厂环境图像组成,包含5类关键部件标注;采用多源数据增强策略,包括随机裁剪、旋转、翻转、光照调整和拼接增强;使用K-Means聚类算法优化先验框尺寸,提高模型对不同尺度目标的适应性。数据预处理步骤包括:图像缩放至640x640分辨率;归一化像素值至[0,1]区间;标签平滑处理,缓解过拟合情况;采用StratifiedKFold交叉验证以确保模型泛化性。
2.损失函数设计
损失函数由三部分组成:类别损失、边界框回归损失和客观性损失。类别损失采用Focal Loss[4]:
其中,pt是预测概率值,α是平衡参数,γ是可调的聚焦参数。