
PHASE 1
1920年代末
人形机器人初现
人形机器人首次走出二维幻想,成为三维实体,具备初步“类人”形态,但功能简单。
原型机 跨越二维 具象化人形概念
1920年代 至 2020 年代
Eeditor's note
1 9 2 0年,捷克作家卡雷尔·恰佩克(K a r e lapek)在其科幻戏剧《罗素姆万能机器人》的剧本创作中首次使用“robot”一词。剧中,robot是被批量制造、服务于人类的类人机器,后因觉醒而反抗人类—robot源自捷克语robota,后者的含义为苦力、强制劳动或奴役。
恰佩克的剧本不仅是robot这个词的起源,更预言了机器人伦理与人类社会的矛盾。自此,人类关于创造类己智能体的执念有了专用名称。
在中文里,机器人一词在语法上属偏正结构,词意的落点在“人”,实际的表达核心却是机器—不是像机器一样的人,而是像人一样的机器。这导致如果想确切表达概念,往往还要加上“人形”这个前缀。
这种纠结,贯穿了人类对人形机器人100年的探索历程:既希望它越来越接近人类,又多少有点恐惧它越来越接近人类;努力赋予它思考能力,又害怕它真正拥有了不受人类控制的思考能力。
进入2020年代,基于大模型的深度学习技术为人形机器人产业打开了新的想象空间,该领域的融资额在2023年同比增长240%,这不仅是技术革命,更是人类自我投射的集体消费。
《列子·汤问》记载,周穆王看过工匠制作的能歌善舞的“能倡者”的表演之后发出一句感叹,时至今日它仍然极具讨论价值。周穆王问的是,
1927
美国西屋电气推出“Televox”
可远程控制电器的早期人形装置。
1928

英国人William Richards和AlanReffell发明“Eric”
能站立、坐下,具人形轮廓。
1929
日本人西村诚开发“学天则”
可变换面部表情,会写日文,第一个东洋机器人。

PHASE 2
1970年代至1990年代
技术启蒙与高校研究
以高校和政府实验室为核心,人形机器人进入“感知—控制—运动”的系统性研究,初步具备“行为”。
大学主 感知控制 基础搭
1973
早稻田大学推出“WABOT-1”
全球首台具有基本感知与控制能力的人形机器人。这是第一个能够行走、与日本人交流(用人造嘴)、使用外部受体(人造耳和眼睛)测量与物体的距离和方向,以及用手抓取和运输物体的机器人。
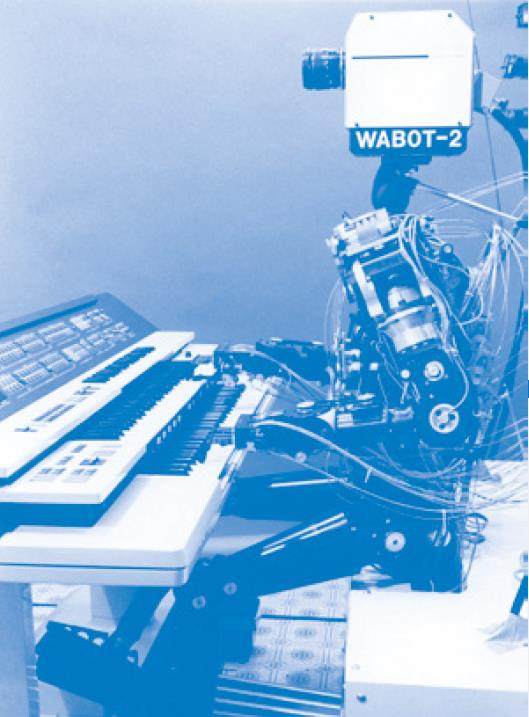
1984
早稻田大学推出“WABOT-2”
能够看懂乐谱,并演奏风琴。
1989
Manny
美国太平洋西北实验室为美国陆军试验场开发的具有42个自由度的全尺寸拟人机器人。