

2025年年初,苹果公司公开了一款台灯样式的桌面机器人原型。其机器学习团队在苹果官方网站上发布了一篇论文,罕见地在概念验证(Proof of Concept,POC)阶段展示了他们的产品设计理念。
这款桌面机器人的外形与皮克斯的经典小台灯相似,除了提供照明,它还能够根据环境自动调整灯光、充当投影仪、提醒用户喝水、向访客介绍房间、播放音乐等。但它的最特别之处在于会扭来扭去地表达情绪。比如,当无法完成任务时,它会伸长机械臂尝试数次,最终低头致歉,并摇头表示沮丧;被询问天气情况后,它会先转头看向窗外,并在说话的同时配合做出拟人化的肢体动作;它还会和人类伙伴一起在音乐中摇摆、舞动,看起来十分开心。
苹果将这款机器人的设计框架命名为针对非拟人化机器人的表意性与功能性动作设计(Expressive and Functional Movement Designfor Non-anthropomorphic Robot,ELEGNT)。他们认为,机器人不该只为了满足用户的功能需求,还应“优雅地”行动。
早期的家用机器人研发以功能需求为导向,最典型的例子是扫地机器人。随着AI技术的发展,机器人也开始尝试叠衣服、烹饪、冲咖啡等家务活。在这些场景里,完成任务、追求效率是机器人的基础使命,而苹果希望在此类产品的思考上更进一步:如何让机器人的动作既高效又富有情感?
一般来说,在机器人运动控制领域,主流的建模方法是马尔可夫决策过程(MarkovDecision Process, MDP)。整个过程像是让机器人玩一个回合制游戏,每一步都要根据当前情况决定如何行动,行动后会得到奖励或惩罚,然后进入下一个状态。对于机器人来说,它的目标就是通过不断学习,找到能让奖励最大化的策略。传统的机器人追求功能性的最大化,比如扫地机器人只会摸索出最高效的清洁路径,完全不管自己的动作看起来是否友好。
苹果的ELEGNT框架还引入了表达性。苹果的设计师们希望机器人兼具功能性和表达性,前者确保任务完成,后者则通过动作来传递意图、注意力、态度与情绪,这对既有的机器人动作设计提出了挑战。机器人需要在一个“知道何时展示情感、何时发挥功能、何时主动表达、何时最好只做被动反应”的多维矩阵中作出选择—这种选择对于不少人类来说都是难题。
苹果的研发人员从人类和动物的肢体语言中获得灵感,设计了一套动作语言,比如台灯机器人用“低头”表达沮丧,用“摇尾巴”表达开心,用“点头”“摇头”表达态度。动作的速度则可以反映情绪唤醒水平—快速、干脆的动作可能表示兴奋或恐惧,缓慢、流畅的动作则可能传达平静或悲伤。另外,他们还研究了如何通过管理空间距离来反映机器人和环境、周围人之间的关系。例如,机器人可以用灯光照亮一个物体,表示它的注意力所在,转换照亮的朝向则表示注意力的切换。
对于机器人的主动表达应该做到什么程度,苹果也在研究中得到了教训。完成初步设计后,苹果找了21位体验者来评估台灯的智能表现。许多体验者表示,这款台灯机器人让他们想到了小狗、孩子或是朋友,很活泼,并且具有幽默感。但是,也有不少人对它的一些主动行为表达了反感,理由是不喜欢自己的生活被机器人掌控,“要是我正沉浸在精彩的阅读中,我可不想被机器人的指令打断”,一位体验者说。
但其最大的创新思考在于,苹果认为机器人的动作无需在细节上模仿人类形态,就能被视作有目的性或富有表现力,因为人类很擅长解读抽象形状的运动。
人不人形并不重要
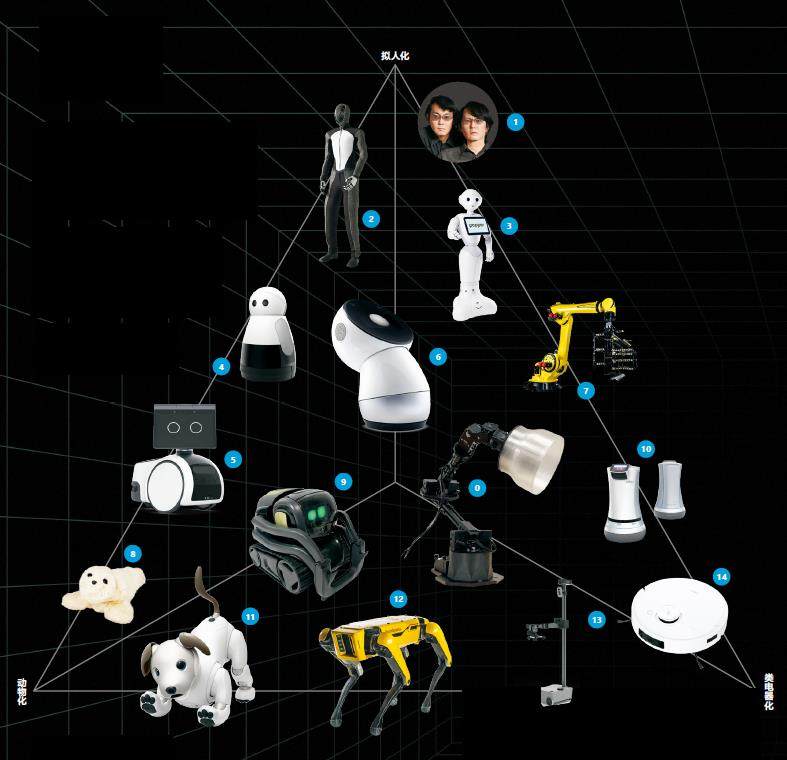
目前,家用机器人已经具有从圆形的扫地机器人到机器宠物,再到人形机器人的多种形态。苹果的相关研究团队将这些设计思路总结为三类:拟人化、动物化和类电器 化。
成立于2 0 1 4 年的挪威初创公司1 XTechnologies公司专注于人形机器人研发,其创始人伯恩特·伯尼奇(Bernt Bornich)曾在接受采访时表示,“也许我们会像《星球大战》一样,拥有不同类型的机器人执行各种任务,但人形机器人依然会占据很大一部分,因为它仍然是最通用的系统。”
苹果却跳出了此类思维框架。其设计思路体现了对用户需求的不同理解:人们想要的不一定是另一个“类人机器”,而是能无缝融入生活、提供情绪价值的智能伴侣。
资深苹果分析师郭明錤在社交平台X上曾发帖称,从供应链信息也可看出,苹果似乎并不太在意机器人是不是人形,而是更关心如何通过认知层面的相互理解来实现高效、自然的交互过程,强调机器人内在的智能和交互能力。这与乔布斯时代的“人文科技”理念一脉相承,也在一定程度上体现出苹果打算再次引领人机交互新模式的雄心。
但“非人形”也将苹果置于一个更艰难的选择中:这个机器人具体要设计成什么形态?
过往的相关研究表明,机器人的形态并非无关紧要。它会塑造用户的预期,并对人机互动过程中的自然沟通与沟通效率产生影响。比如,人形机器人因为“像人”,因此会给人“它是有生命的”的感觉,非人形机器人则依赖外观设计与动作的协同来传达这种类生命感。