



树莓派六足机器人实现智能分类搬运(二)
在第8期的《用树莓派机器人实现更智能的垃圾分类搬运》中,树莓派六足机器人相继实现了正对目标物体的识别搬运、任意位置目标物体的识别搬运。接下来,我们将考虑多个目标物体的识别问题,尝试让机器人完成多任务的识别和搬运工作。本文将在原来的程序中增加步骤判断,实现一个任务完成后,自动进入下一个目标的搬运任务。
一、树莓派实验器材及连接
实验器材:树莓派六足机器人一套(六足机器人、树莓派4B、古德微扩展板、电机驱动板、USB摄像头),目标物体两个(红色、蓝色海绵正方体各一个,边长为10厘米)(如图1)。

二、創建物体检测模型
创建物体检测模型的步骤与前例相同。
1.登录网站,开始“物体检测
登录古德微机器人网站(www.gdwrobot.cn),选择“物体分类”进入“远程使用树莓派摄像头进行物体分类”页面。

2.采集并标注,训练与验证
使用拍照功能,不断变换机器人的位置与角度,进行目标图片的添加,完成目标图片的采集工作。这个过程目标图片采集得越多,后期识别的效率和准确度就会越高。
然后,完成对采样的目标图片的物体的标注工作。接下来,使用“开始训练”按钮对采集的图片进行训练。最后对预览图片中的物体进行分类验证,目标物体的分类识别置信度在80%以上,即说明训练模型具有较高的应用价值。
3.下载训练模型文件,保存至树莓派中
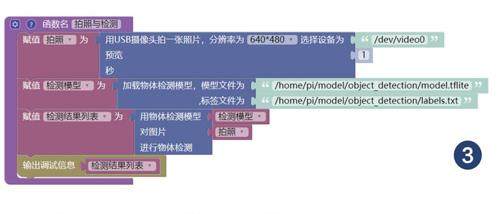
完成拍照采集与训练验证后,点击“下载树莓派上使用的模型”,等到“模型转换下载完成”提示。这时,文件下载到树莓派的/home/pi/model/object_detection目录下,模型文件为model.tflite,对应标签文件为labels.txt。通过Windows的远程桌面连接进入树莓派进行查看,labels.txt的文件内容包含两行,依次对应训练模型的分类名称:“红色、蓝色”。

登录后获取阅读权限
去登录
本文刊登于《电脑报》2023年16期
龙源期刊网正版版权
更多文章来自

订阅